Software
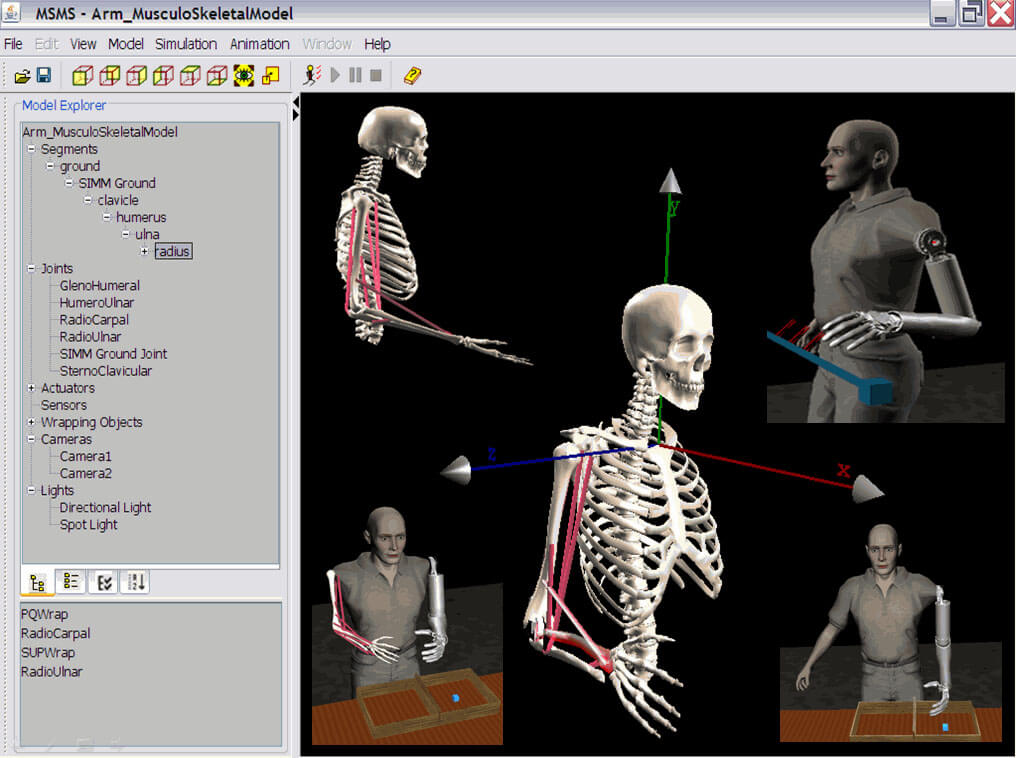
MSMS is a software for modeling of paralyzed and prosthetic limbs and simulation of their movement under various neural control strategies. The simulations of MSMS models can be run in typical PCs to test and evaluate different prosthetic control strategies or in real-time PCs with stereoscopic displays to enable design engineers and prospective users to evaluate candidate neural prosthetic systems and learn to operate them before actually receiving them.
For questions and comments on MSMS, please contact Dr. Gerald Loeb.
MusculoSkeletal Modeling Software - MSMS
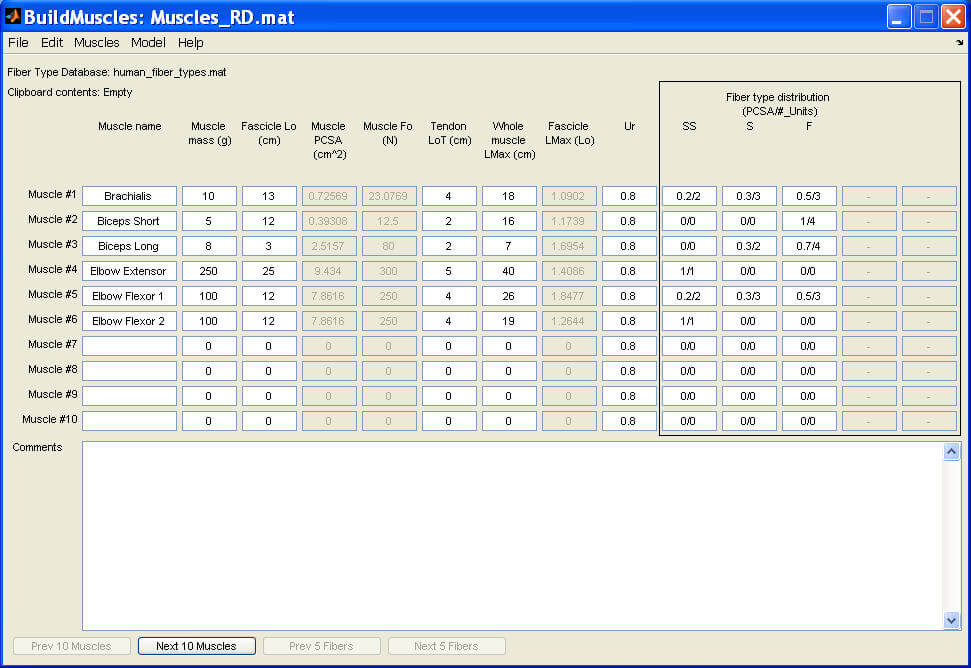
Virtual Muscle - VM
The purpose of VM software is to enable the users to build accurate models of muscles, based on experimentally obtained data that can be adapted to any fiber type and can be easily integrated into any existing biomechanical models. The equations which drive the behavior of this model are outlined in part at the 1998 Society for Neuroscience meeting in Los Angeles, and are elaborated in a series of paper by Brown et al., 1999. In summary, using a modified Hill-type model, we have been able to account for many phenomenon that have been absent in previous models, including potentiation, length dependence of activation and effective frequency of stimulation, in addition to the basic FL and FV relationships.
VM is a Matlab-based application that can be used to create dynamic models of isolated muscles in Simulink. You can interface these isolated muscle models with your own models of skeletal system in Simulink. This interface, however, is complicated and difficult to implement for typical users. So, if you plan to use VM to actuate a skeletal system, consider using MSMS software that includes the latest version of VM and has the tools to model and simulate complex musculoskeletal and prosthetic systems.
For questions and comments on VM, please contact Dr. Gerald Loeb.